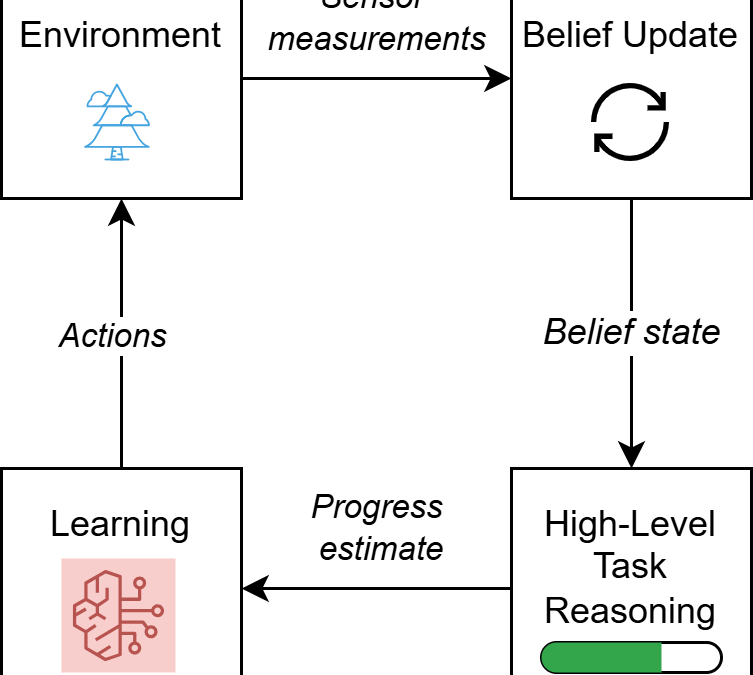
 Reinforcement learning for multi-agent systems under semantic and perceptual uncertainties Multi-agent collaborative tasks for autonomous agents such as search and rescue tasks often take place in environments where properties and dynamics of the environment are...
Reinforcement learning for multi-agent systems under semantic and perceptual uncertainties Multi-agent collaborative tasks for autonomous agents such as search and rescue tasks often take place in environments where properties and dynamics of the environment are...
 Clamp-Force-Centric Estimation and Control for Threaded Fastener Tightening The clamp force (assembly preload) is central to joint integrity, but variations in friction and embedment make torque- and angle-based strategies inconsistent in achieving a target clamp...
Clamp-Force-Centric Estimation and Control for Threaded Fastener Tightening The clamp force (assembly preload) is central to joint integrity, but variations in friction and embedment make torque- and angle-based strategies inconsistent in achieving a target clamp...
 Modeling, control, and optimization of thermotronic systems The project started with a comprehensive exploration of turbocharger performance modeling, focusing on both the compressor and turbine sides. The initial phase aims to develop a solid understanding of how...
Modeling, control, and optimization of thermotronic systems The project started with a comprehensive exploration of turbocharger performance modeling, focusing on both the compressor and turbine sides. The initial phase aims to develop a solid understanding of how...
 Autonomous farming: Estimation and control Copyright Väderstad. Climate change, population growth, and the urgent need to preserve biodiversity present major challenges for the future of food production. Agriculture is central when addressing these issues. One...
Autonomous farming: Estimation and control Copyright Väderstad. Climate change, population growth, and the urgent need to preserve biodiversity present major challenges for the future of food production. Agriculture is central when addressing these issues. One...
 Collaborative decision-making in uncertain scenarios Our research initiative aims to tackle challenges in multi-agent decision-making under uncertainty, with a focus on mission-critical scenarios. We will investigate how autonomous systems can effectively collaborate...
Collaborative decision-making in uncertain scenarios Our research initiative aims to tackle challenges in multi-agent decision-making under uncertainty, with a focus on mission-critical scenarios. We will investigate how autonomous systems can effectively collaborate...