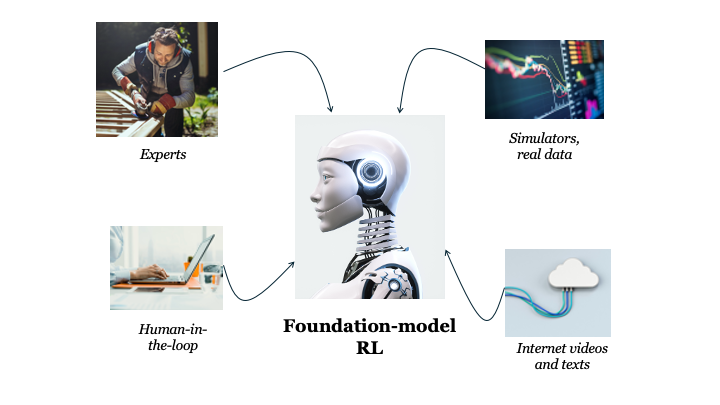
 Foundation Model and Reinforcement Learning One of the main challenges in control is generalization to diverse and unseen tasks. Conventional control methods and modern Reinforcement Learning (RL) approaches have focused on task-specific solutions or a tabula rasa...
Foundation Model and Reinforcement Learning One of the main challenges in control is generalization to diverse and unseen tasks. Conventional control methods and modern Reinforcement Learning (RL) approaches have focused on task-specific solutions or a tabula rasa...
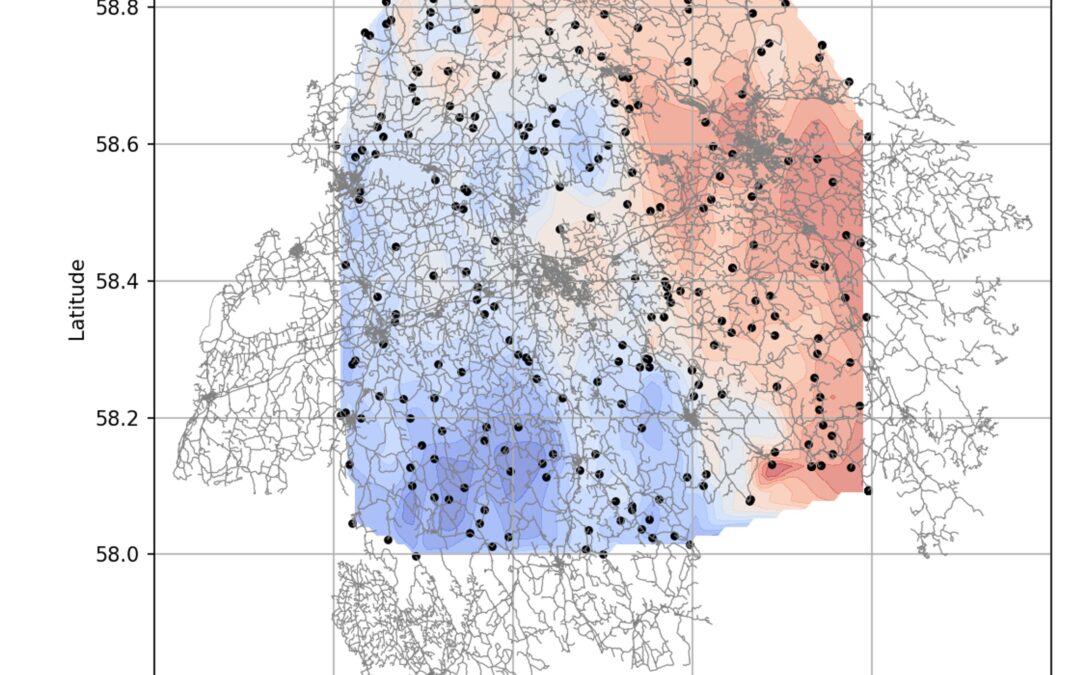 Optimizing Vehicle Data Transmission for AccurateRegional Temperature Mapping Electrification in heavy transport is essential to reduce dependence on fossil fuels and decrease emissions. The transition also requires adapting transportation to maximize the driving...
Optimizing Vehicle Data Transmission for AccurateRegional Temperature Mapping Electrification in heavy transport is essential to reduce dependence on fossil fuels and decrease emissions. The transition also requires adapting transportation to maximize the driving...
 Safe motion-planning with learning in the loop This project advances our work in optimal motion planning by integrating methods from AI and optimal control into more efficient and powerful approaches than those achieved individually. The primary tools to be...
Safe motion-planning with learning in the loop This project advances our work in optimal motion planning by integrating methods from AI and optimal control into more efficient and powerful approaches than those achieved individually. The primary tools to be...
 Human Senses Mimicking: Mechanical Integrity Self-Assessment Autonomous driving is expected to revolutionize the automotive industry. This paradigm shift will bring a new level of automotive freedom to customers. From a safety point-of-view, fully autonomous driving...
Human Senses Mimicking: Mechanical Integrity Self-Assessment Autonomous driving is expected to revolutionize the automotive industry. This paradigm shift will bring a new level of automotive freedom to customers. From a safety point-of-view, fully autonomous driving...
 Robust Large-Scale Estimation State estimation has been highly successful in many applications, such as mobile navigation and situational awareness. Typically, current solutions rely on relatively small-scale systems where all sensor data is available in a central...
Robust Large-Scale Estimation State estimation has been highly successful in many applications, such as mobile navigation and situational awareness. Typically, current solutions rely on relatively small-scale systems where all sensor data is available in a central...